פיתוח אלגוריתמיים ויצירת ביג-דאטה של תנועת גפיים אנושיות הרמונית למשתמש האנושי, לאימון מערכות AI ביו-רובוטיות וגפיים מלאכותיות
מערכות ביו-רובוטיות בכלל וגפיים מלאכותיות בפרט נדרשות להבנה של מצבו וניבוי כוונותיו של המשתמש האנושי על מנת ליצור תנועה רובוטית הרמונית ויעילה עבור המפעיל האנושי שלהם.
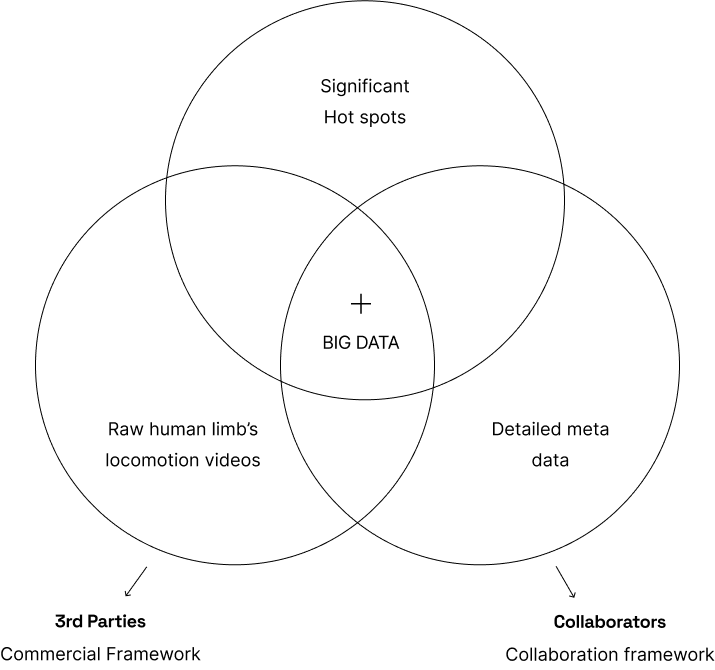
המודל הקונספטואלי שלנו מכוון לפיתוח מודלי Physical AI וחומרה מתאימה שתאפשר יכולות אלו. אימון המודלים מחייב שימוש בכמויות גדולות מאד של נתוני תנועת גפיים אנושיות במרחב, מפורטים ומתוייגים. על מנת לאפשר פיתוח ושימוש במודלי ה Physical AI על ידי שותפי המו"פ שלנו ולקוחות שונים, Bility מפתחת כלים אלגוריתמיים ומאגר ביג-דאטה של תנועת גפיים אנושיות במרחב ותנגיש אותו לשותפי המו"פ, לקבוצות מחקר וללקוחות מתעשיות רלוונטיות.
השיטה
מה אנחנו מפתחים?
אנחנו מפתחים מודלים וסימולטור להבנה של מצבו וניבוי כוונותיו של המשתמש האנושי על מנת ליצור תנועה רובוטית הרמונית ויעילה עבור המפעיל האנושי שלהם. המודלים מבוססים על נתוני וידאו אמיתיים, מטא-נתונים מחושבים אלגוריתמית ומודלים ביו-מכניים.
הסימולטור יאפשר לייצר כמות גדולה של נתונים אחידים, מתוייגים ומפורטים של תנועת גפיים אנושיות במרחב שתוכננו בקפידה לצורך אימון יעיל ומדוייק של מודלי Physical AI. אנחנו נספק גישה למאגר הנתונים, כלים ומסגרת עבודה שיאפשרו פיתוח שיתופי של מערכות ביו-רובוטיות מבוססות AI.
משתמשי מטרה
מי יכול להשתמש בתוצרים שלנו?
אנחנו נספק גישה למאגר הביג-דאטה של תנועת גפיים אנושיות במרחב, רשיונות שימוש לסימולטור ולכלים השונים אותם אנחנו מפתחים, לשותפי המו"פ שלנו במסגרת מודל שיתופי הפעולה ובאופן מסחרי ללקוחות וארגונים שמעונינים לעשות שימוש בנתונים ובכלים למטרותיהם.
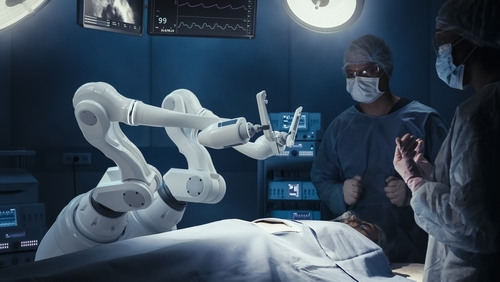
תעשיות הרובוטיקה והביו-רובוטיקה
מרכזי פיתוח של רובוטים רפואיים, רובוטים תעשייתיים, רובוטים דמויי אדם וגפיים מלאכותיות, יוכלו להשתמש במאגר הביג-דאטה שלנו, בסימולטור ובכלים שונים אותם אנחנו מפתחים על מנת להטמיע במוצרים שונים תנועה רובוטית המחקה תנועה אנושית מדוייקת.
במסגרת הכלים אותם אנחנו מספקים, גופים אלו יוכלו למנף את השיטות והכלים שלנו לפיתוח שיתופי של מודלי AI לסביבה רובוטית על מנת להאיץ ולאפשר תהליכי פיתוח מבוזרים ביעילות.
יצרנים של בגדי ספורט מתקדמים ועזרים לבישים
יצרנים של בגדי ספורט מתקדמים ועזרים לבישים מפתחים מוצרים שפעולתם האפקטיבית תלויה במידה רבה ביכולתם לנתח ולהתאים את פעולתם לתנוחת הגוף ולתנועה האנושית במרחב.
שילוב של שימוש במאגר הביג-דאטה והכלים המתקדמים שלנו בשלבי פיתוח מוצרים אלה יאפשר הבנה מדויקת ועמוקה יותר של התנועה האנושית במרחב ויסייעו בפיתוח הדור הבא של המוצרים בעלי ביצועים משופרים.
תעשיית החלל
תעשיית החלל מתפתחת במהירות רבה בשנים האחרונות ונשענת במידה רבה על מערכות רובוטיות עצמאיות לביצוע משימות שונות בחלל. רבות מהמשימות הרובוטיות הנדרשות מחקות תנועת גפיים אנושיות במרחב. מאגר הביג-דאטה והכלים השונים אותם אנחנו מפתחים יאפשרו פיתוח של מודולים רובוטים מבוססי AI המשלבים דיוק תנועה אנושי בשילוב עם יכולות רובוטיות מתקדמות.
מחקר אקדמאי
קבוצות מחקר אקדמאיות בתחומים שונים כמו מדעי מחשב, רובוטיקה, פיזיותרפיה, רפואה והנדסה רפואית חוקרים הבטים שונים של תנועת גפיים אנושיות במרחב ועשויים למצוא עניין מחקרי רב במאגר הביג-דאטה אותו אנחנו מקימים. המידע הביו-מכני המפורט, המטה-דאטה, סימולציות התנועה ונתוני האמת שמהם מורכב מאגר המידע שלנו, יכולים להוות בסיס למחקרים ומאמרים פורצי דרך בתחומים אלו.